Portfolio item number 1
Short description of portfolio item number 1

Short description of portfolio item number 1
Short description of portfolio item number 2
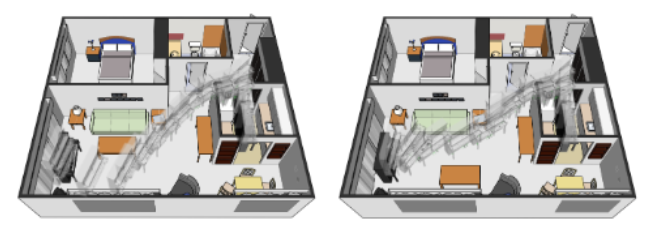
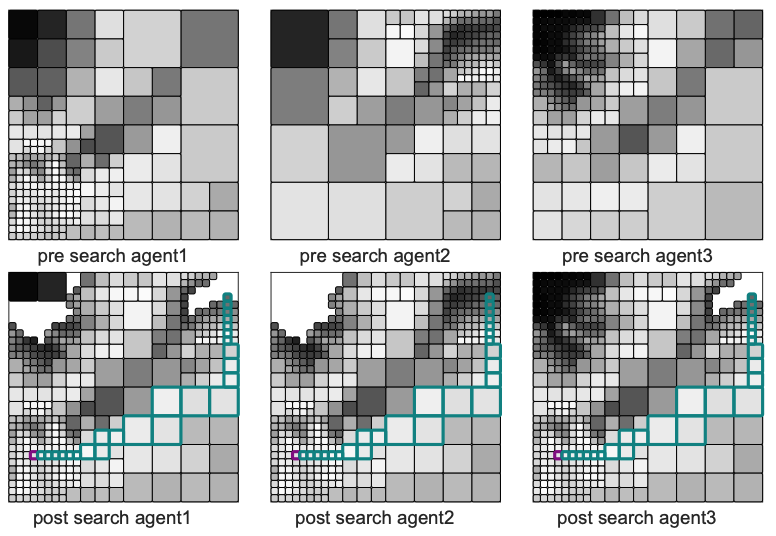
 The objective of MAPF problem is to find a collision-free set of paths for multiple agents in the same environment while minimizing some global cost like the sum of time travelled or the time travelled by the last agent. We propose a way to generate informative heuristic plan lazily as in the Conflict Based Search (CBS) framework, decomposing the joint search problem to multiple individual agent path finding problem. We improve the performance of CBS by producing more informative heuristic plans based on the semantic planning of each individual agent by taking future inter-conflicts into consideration.
The objective of MAPF problem is to find a collision-free set of paths for multiple agents in the same environment while minimizing some global cost like the sum of time travelled or the time travelled by the last agent. We propose a way to generate informative heuristic plan lazily as in the Conflict Based Search (CBS) framework, decomposing the joint search problem to multiple individual agent path finding problem. We improve the performance of CBS by producing more informative heuristic plans based on the semantic planning of each individual agent by taking future inter-conflicts into consideration.
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
Published in , 1900
Recommended citation: Lim, J., and Tsiotras, P., "A Generalized A* Algorithm for Finding Globally Optimal Paths in Weighted Colored Graphs," 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 7503-7509, doi: 10.1109/ICRA48506.2021.9561135.
Published in , 1900
Recommended citation: Lim, J., Salzman, O., and P. Tsiotras, "Class-Ordered LPA*: An Incremental-Search Algorithm for Weighted Colored Graphs," 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 6907-6913, doi: 10.1109/IROS51168.2021.9636736.
Published in , 1900
Recommended citation: Sun, W., Pan, Y., Lim, J., Theodorou, E., and Tsiotras, P., "Min-Max Differential Dynamic Programming: Continuous and Discrete Time Formulations," AIAA Journal of Guidance, Control, and Dynamics, Vol. 41, No. 12, pp. 2568-2580, 2018, doi: 10.2514/1.G003516.
Published in , 1900
Recommended citation: Lim, J., Srinivasa, S., and Tsiotras, P., "Lazy Lifelong Planning for Efficient Replanning in Graphs with Expensive Edge Evaluation,” arXiv e-prints, arXiv:2105.12076, May. 2021.
Published in , 1900
Recommended citation: Lim, J., and Tsiotras, P., "MAMS-A*: Multi-Agent Multi-Scale A*," 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 5583-5589, doi: 10.1109/ICRA40945.2020.9197045.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.