
Multi-Agent Path Finding
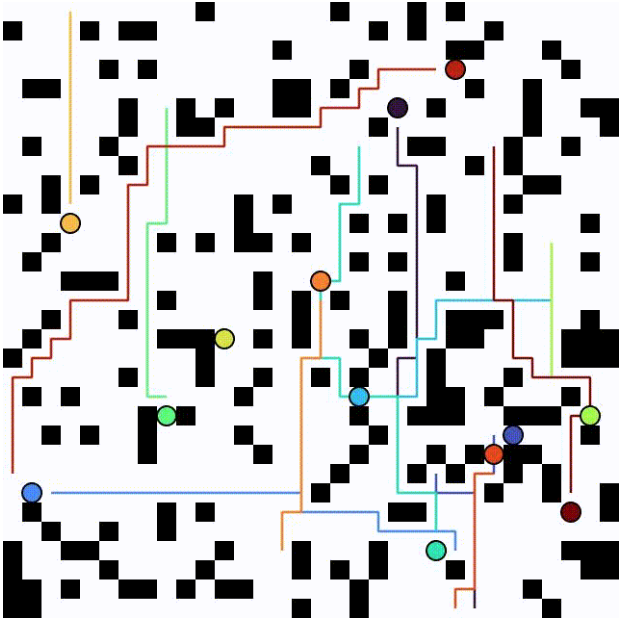 The objective of MAPF problem is to find a collision-free set of paths for multiple agents in the same environment while minimizing some global cost like the sum of time travelled or the time travelled by the last agent. We propose a way to generate informative heuristic plan lazily as in the Conflict Based Search (CBS) framework, decomposing the joint search problem to multiple individual agent path finding problem. We improve the performance of CBS by producing more informative heuristic plans based on the semantic planning of each individual agent by taking future inter-conflicts into consideration.
The objective of MAPF problem is to find a collision-free set of paths for multiple agents in the same environment while minimizing some global cost like the sum of time travelled or the time travelled by the last agent. We propose a way to generate informative heuristic plan lazily as in the Conflict Based Search (CBS) framework, decomposing the joint search problem to multiple individual agent path finding problem. We improve the performance of CBS by producing more informative heuristic plans based on the semantic planning of each individual agent by taking future inter-conflicts into consideration.
Publications
To be appeared…