
Autonomous Navigation

We are developing an autonomous navigation stack for a 1/10 scale robotic car platform processed by NVIDIA Jetson TX2, equipped with latest sensors including ZED camera, IMU, and Hokuyo UST-10LX LiDAR.
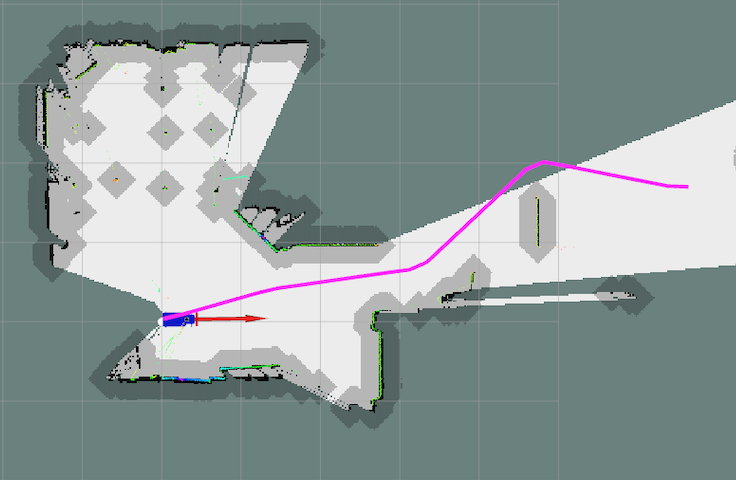
We are developing an online planning stack and a user-interface in ROS for the Open Motion Planning Library based planners to quickly replan in a dynamic environment, as a part of the full autonomous navigation stack
Publications
To be appeared…